Control Systems When the polynomial is Routh Hurwitz, none of these. the roots of function have real parts which are to be zero/negative. the function is not real. all zeroes lie in the right half of the s-plane. none of these. the roots of function have real parts which are to be zero/negative. the function is not real. all zeroes lie in the right half of the s-plane. ANSWER DOWNLOAD EXAMIANS APP
Control Systems For a second order under damped system subjected to unit step input the time response has first peak value to be 4 times the second over shoot. Determine the damping ratio ξ ? 0.87 0.707 0.087 0.07 0.87 0.707 0.087 0.07 ANSWER DOWNLOAD EXAMIANS APP
Control Systems For the polynomial , find the number of roots which lie on the right half of s-plane? 1 2 0 4 1 2 0 4 ANSWER DOWNLOAD EXAMIANS APP
Control Systems A proportional plus integral controller both 2 and 3 has high sensitivity increases the stability of the system it increases rise time both 2 and 3 has high sensitivity increases the stability of the system it increases rise time ANSWER DOWNLOAD EXAMIANS APP
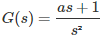
Control Systems The value of 'a' in to give phase margin = 45o will be 0.9. 0.707. 1.18. 1.414. 0.9. 0.707. 1.18. 1.414. ANSWER DOWNLOAD EXAMIANS APP
Control Systems The type number of the control system with G(s) = k(s+2)/(s(s²+2s+3) is 0 2 1 3 0 2 1 3 ANSWER DOWNLOAD EXAMIANS APP