Control Systems Force balancing equation for elastic element (K) is (where, x = displacement) K d2x/dt2 None of these K *x K dx/dt K d2x/dt2 None of these K *x K dx/dt ANSWER DOWNLOAD EXAMIANS APP
Control Systems A second order control system has F(jω) = 100/(100 - ω² + 10√2 jω). Find the resonant peak? 1.5 0.5 0.707 1 1.5 0.5 0.707 1 ANSWER DOWNLOAD EXAMIANS APP
Control Systems In polar plots if the critical point '-1+j0' is enclosed then the system is -------- critical stable stable marginally stable unstable critical stable stable marginally stable unstable ANSWER DOWNLOAD EXAMIANS APP
Control Systems The step response of the system described by the differential equation will be (1/6)*(1-e-6t). non of above. e-3t u(t). e6t. (1/6)*(1-e-6t). non of above. e-3t u(t). e6t. ANSWER DOWNLOAD EXAMIANS APP
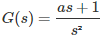
Control Systems The value of 'a' in to give phase margin = 45o will be 1.414. 1.18. 0.707. 0.9. 1.414. 1.18. 0.707. 0.9. ANSWER DOWNLOAD EXAMIANS APP
Control Systems Time response for a second order control system depends on value of ξ. If ξ>1 then the system is called as over damped system. under damped system. critically damped system. undamped system . over damped system. under damped system. critically damped system. undamped system . ANSWER DOWNLOAD EXAMIANS APP